Data Specs / 2026-06-06
Human demonstration dataset checklist for robotics teams
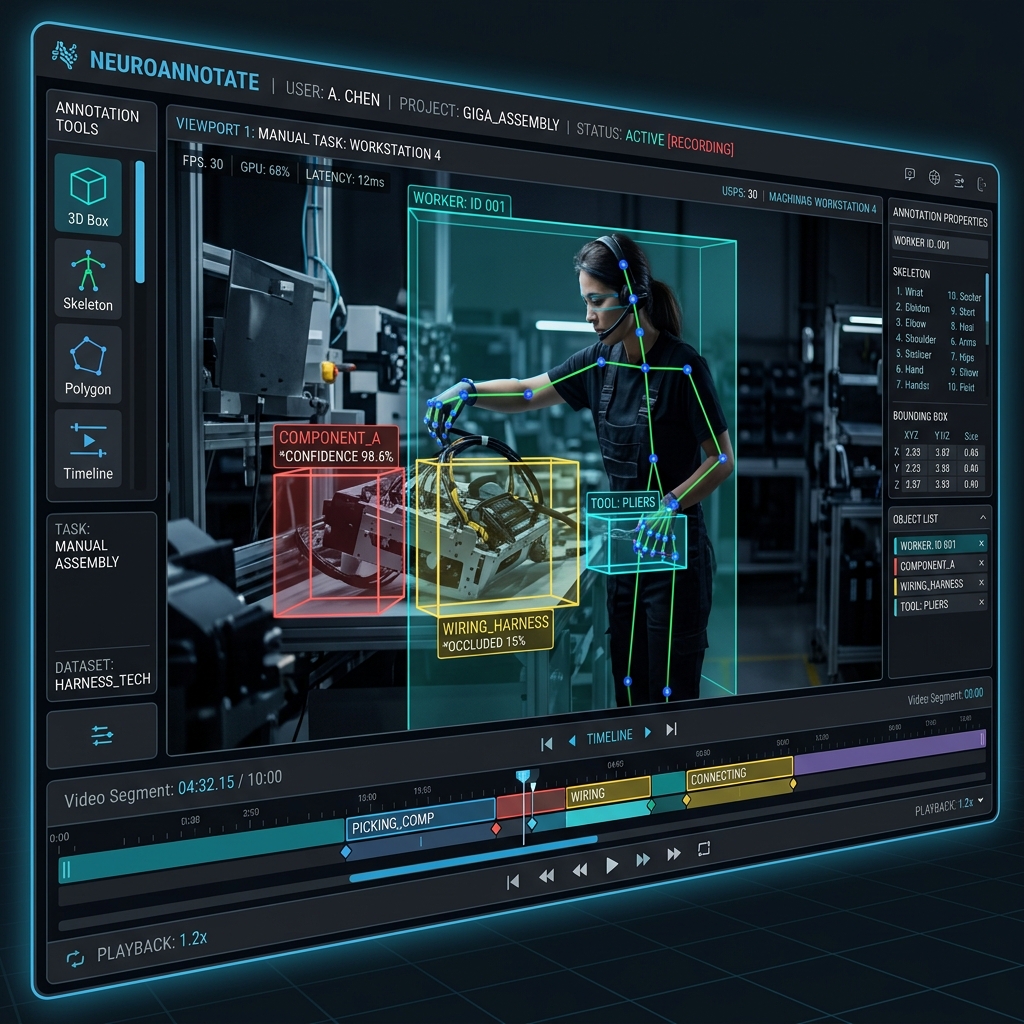
Learn which fields matter when evaluating human action video for robotics: task labels, hands, objects, camera view, quality score, and consent status.
Continue readingInsights
Practical notes on human demonstrations, capture programs, consent, anonymization, annotation schemas, and dataset QA.
A practical checklist for evaluating clips, metadata, capture specs, annotations, consent, and QA before training physical AI systems.
Read ArticleLatest
Learn which fields matter when evaluating human action video for robotics: task labels, hands, objects, camera view, quality score, and consent status.
Continue reading
A concise guide to consent-first robotics datasets, anonymization, and commercial-use data collection.
Continue reading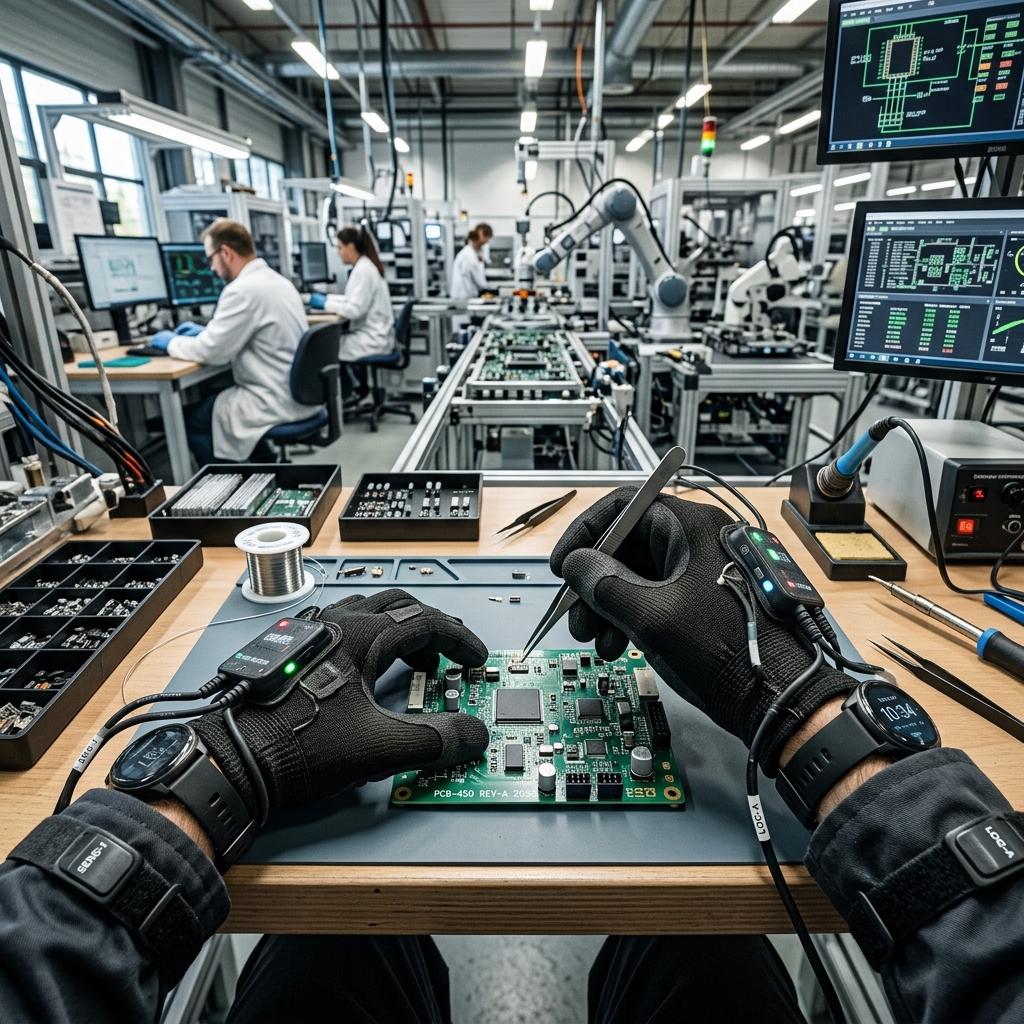
Explore capture quality checks for egocentric and exocentric human task videos used in robotics training.
Continue readingCompare egocentric and exocentric robotics datasets, including their strengths, limitations, capture requirements, and best-fit use cases.
Continue readingLearn how to structure robotics dataset metadata across tasks, actions, objects, hands, cameras, timestamps, quality, consent, and annotations.
Continue readingExplore practical sim-to-real robotics data strategies, including domain coverage, real-world calibration, co-training, and evaluation.
Continue readingLearn how to collect and evaluate bimanual manipulation video datasets for folding, assembly, food preparation, and tool-use tasks.
Continue readingA guide to collecting industrial robotics datasets across assembly, inspection, garment work, material handling, and tool-use workflows.
Continue reading
Learn how Indian household task data can broaden the environments and manipulation patterns represented in physical AI datasets.
Continue readingA practical guide to capturing and annotating bimanual manipulation data for robotics training.
Continue readingSee the core clip, task, camera, quality, consent, and annotation fields for a robot learning dataset.
Continue readingBuilt for teams that need inspectable real-world robotics data, clear consent workflows, and practical capture operations.